Siguiendo las indicaciones de esta página 3DPBurner, hace ya mas de un año que construí una unidad de esta máquina de grabado laser con la que podemos pasar fotos a madera en escala de grises. Esta fue la primera versión.

Paso a comentar mis impresiones y experiencias, que no van mas allá de la construcción, modificación y primeros trabajos pues realmente no la he usado mucho por dar prioridad a otros proyectos.
Lo primero es juntar el material y para esto hay que conocer varias palabras para poner en el buscador, como por ejemplo:
-"laser TTL". El módulo TTL permite que el laser no solo pueda estar encendido o apagado sino que encienda con diferentes intensidades, usadas para hacer los diferentes tonos de gris.
Yo instalé un laser Violeta (405nm) de 150 mW que compre por 28€ y actualmente por este precio podemos adquirir uno de 500mw con lo que podemos ir mas rápido para hacer el mismo trabajo.
Desconozco si con 500mW ya podemos cortar algún tipo de madera fina. Pero los 10W necesarios para grabar metal se alejan mucho de este precio.
-"grbl shield" el escudo que conecta Arduino con los controladores de los motores paso a paso, el laser, la alimentación etc. No se si es barato (por lo que hace) o caro (por lo que es), compré varios a 1.05€ con envío gratis, ahora un poco más.
Aquí surgió el primer problema. Nada mas conectar, todo deja de funcionar, se funde el fusible del shield que habrá que sustituir por un trozo de cable.
- Para controlar los motores paso a paso podemos buscar "stepper driver" o mejor directamente "drv8825" (las búsquedas generales son siempre más caras). Muerte a los a4988, se duermen. Debo tener una quincena en los cajones sin usar, la diferencia entre unos y otros es de unos 20 centimos y los A4988 solo sirven para dejar trabajos a medias y perder material. Lo voy a decir abiertamente "te odio a4988"
- Motores paso a paso. Sabemos que la especificación NEMA17 de los motores paso a paso se refiere a sus dimensiones físicas, no a otras características como torque o voltaje. Como en muchos otros ámbitos lo mas usado suele ser lo mas barato y aunque podemos construir este tipo de maquina (que no carga un gran peso) con motores ridículos y os recomendaría buscar "17hs4401". Rondan los 34 € 5 unidades con terminales dupont para conectar directamente en el shield. Recuerdo también que me resistía a creer que cuando el fabricante especificaba que eran de 3 voltios pudiesen servir para 12 o 24 sin derretirse jajaja
- Piezas impresas. Si no tenéis impresora y conocéis a alguien que la tenga no creo que os cueste mucho el trabajo pues no es lo mismo imprimir versiones finales que imprimir piezas en desarrolo que hay que imprimir y reimprimir y...(estoy viendo en la estantería un mini-trípode para la reflex en el que gasté mas de un kilito de plástico, algún día lo subiré, pero por el momento lo que me consuela es que es una pieza única en el mundo... y cada vez que lo miro aún se me ocurre alguna pequeña modificación, no...no lo voy a decir abiertamente).
Por este motivo hice una pequeña donación y recibí un enlace con las últimas versiones de las piezas. aunque ahora están disponibles en thingverse en el siguiente enlace.
Ya funcionaba. Ya se movía!!!!
... pero no muy bien, demasiado ancho para solo un anclaje en el eje Y.
Era hora de sacar el afila lapices
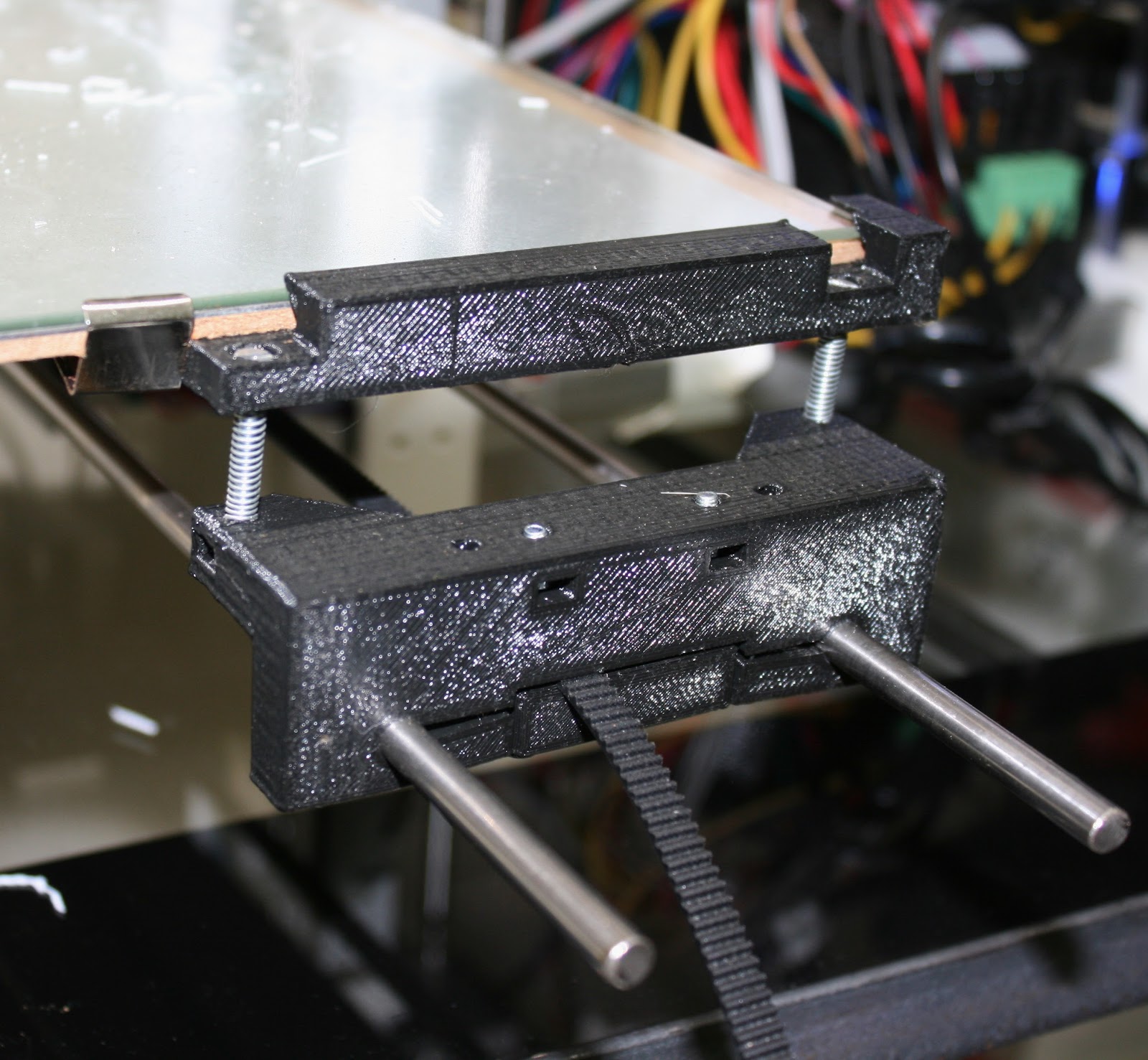
Usar dos motores en el eje no resuelve el problema de dar la misma tensión a las los correas, solo aumenta costes, entonces habrá que mover dos correas con el mismo motor.


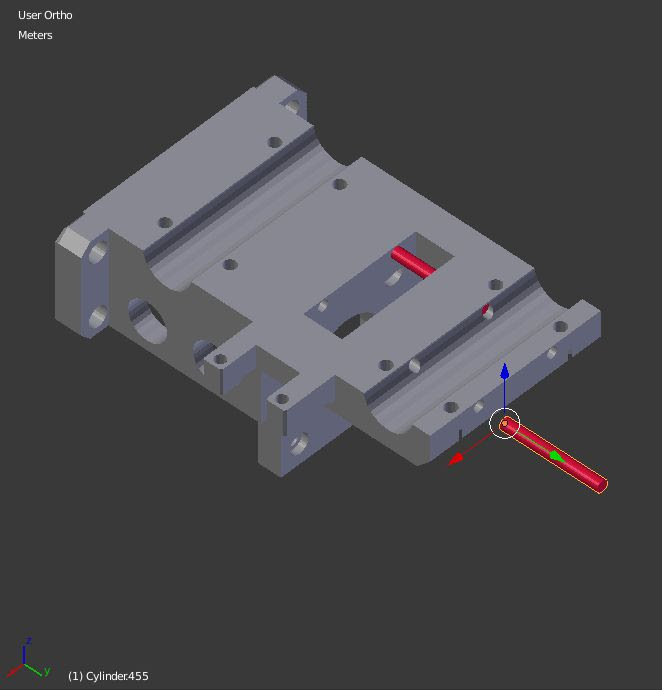
Nota: a principios de verano, con el aumento de las temperaturas y debido a la tensión se rompieron estas piezas y las re-diseñé reforzandolas con un tornillo metálico. Este es el ENLACE a la versión de Thingverse pero con el ARCHIVO de Blender podréis personalizar para la medida de vuestros rodamientos.
El siguiente paso era poner los finales de carrera, para poner a cero la máquina y poder reposicionarla sin mucho error. Y surgió el segundo problema. No encontraba los pines correcctos para conectarlos. La serigrafía del shield NO corresponde con el pinout del frimware que podemos consultar en este enlace. Solo hay que ver donde salen en la parte superiór. El reposicionamiento es asombrosamente preciso.
Antes de conectar los finales de carrera leí atentamente el modo de conexión pues hasta hace unos días, el único Arduino que me había cargado fue conectando mal los finales de carrera de una impresora. La reparación no fue muy cara ya que solo tuve que sustituir el regulador de tensión de la placa(1117).
Así paso algún que otro mes hasta que cayó en mis manos un trozo de goma eva. Es un material llamativo, atractivo... como muchos otros pero mi pequña "linternita" laser puede grabarlo e incluso cortarlo.

estas son unas pruevas a distintas velocidades, aunque dependen del color de la goma




La configuración final es mas grande para poder trabajar sobre láminas enteras de 600x400 mm y ademas rediseñe los soportes para poder utilizar dos tableros del mismo ancho. Es fácil ir a una gran superficie de bricolaje y pedir que corten uno pequeño a la mitad